
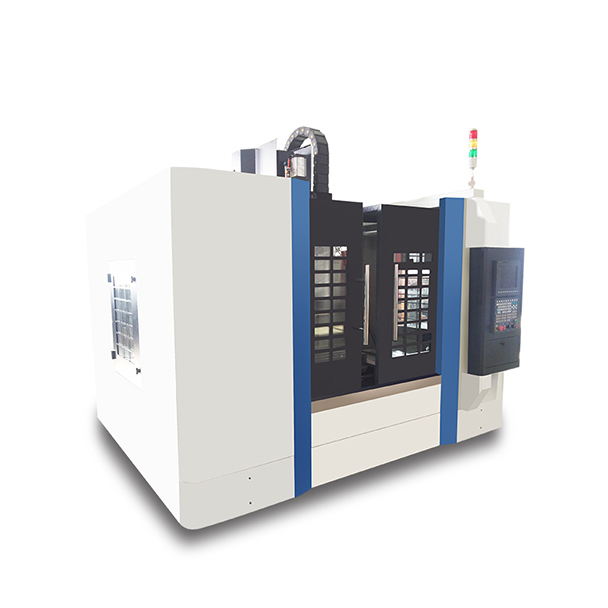


Trung tâm máy phay CNC 3 trục đứng kim loại nhà máy vmc1060
Thuận lợi
1. Bàn xoay CNC tùy chọn có thể hình thành quá trình xử lý liên kết tọa độ bốn trục và năm trục.
2. Thiết bị loại bỏ phoi tự động tùy chọn, với cấu trúc giường để đảm bảo độ sạch bên trong;làm mát dầu trục chính tùy chọn, v.v.
3. Đúc trải qua hai lần xử lý lão hóa để loại bỏ ứng suất dư trong vật liệu.
4. Các thanh dẫn hướng X, Y, Z có thể chọn các thanh dẫn hướng bi tuyến tính hạng nặng của Đài Loan, có đặc điểm tốc độ nhanh, độ cứng cao, v.v.

Sự chỉ rõ
| Mục | VMC1060 | ||||
| Kích thước bàn làm việc (dài × rộng) mm | 1300 × 600 | ||||
| Khe chữ T (mm) | 5-18 × 100 | ||||
| Trọng lượng tải tối đa trên bàn làm việc (KG) | 650 | ||||
| Hành trình trục X (mm) | 1000 | ||||
| Hành trình trục Y (mm) | 600 | ||||
| Hành trình trục Z (mm) | 600 | ||||
| Khoảng cách giữa mũi trục chính và bàn (mm) | 100-700 | ||||
| Khoảng cách giữa tâm trục chính và cột (mm) | 667 | ||||
| Côn trục chính | BT40 / 50 | ||||
| Tối đatốc độ trục chính (vòng / phút) | 8000/10000/12000 | ||||
| Công suất động cơ trục chính (Kw) | 15/11 | ||||
| Tốc độ nạp liệu nhanh: trục X, Y, Z (m / phút) | 16/16/16 (24/24 // 24 hướng dẫn lót) | ||||
| Tốc độ cắt nhanh (m / phút) | 10 | ||||
| Độ chính xác vị trí (mm) | ± 0,005 | ||||
| Độ chính xác vị trí lặp lại (mm) | ± 0,003 | ||||
| Loại công cụ thay đổi công cụ tự động | Bộ thay đổi công cụ loại đầu 16 dụng cụ (tùy chọn bộ thay đổi công cụ tự động loại 24 cánh tay) | ||||
| Tối đachiều dài dụng cụ (mm) | 300 | ||||
| Tối đaĐường kính dụng cụ | Φ80 (công cụ liền kề) / φ150 (không phải công cụ liền kề) | ||||
| Trọng lượng tối đa (KG) | 8 | ||||
| Thời gian thay đổi công cụ (công cụ sang công cụ) giây | 7 | ||||
| Áp suất không khí (Mpa) | 0,6 | ||||
| Trọng lượng máy (KG) | 7500 | ||||
| Kích thước tổng thể (mm) | 3340 * 2800 * 2700 | ||||
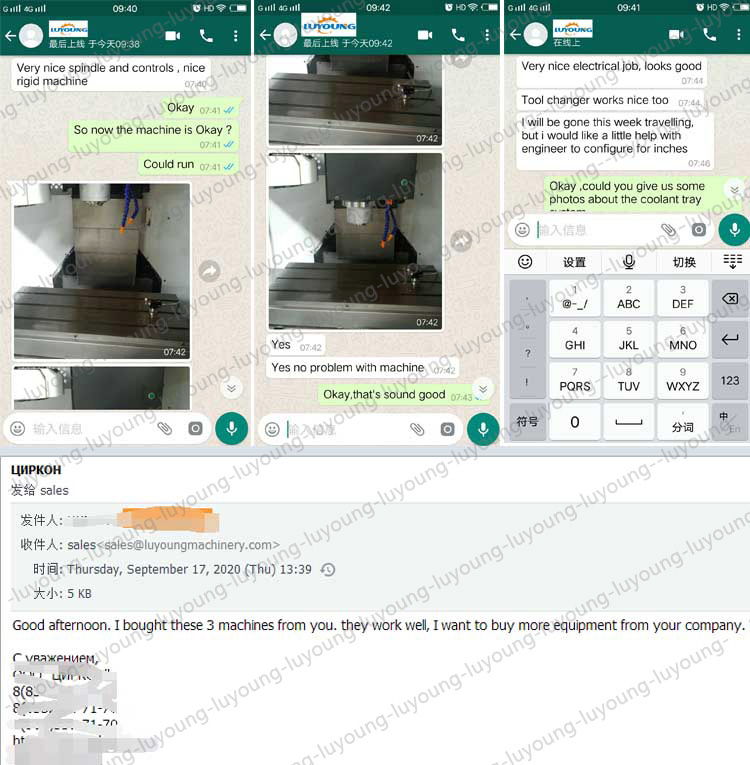
Tại sao chọn chúng tôi
Chúng tôi nhận được rất nhiều phản hồi tốt từ khách hàng, ví dụ như:
Trục xoay và điều khiển rất Đẹp, máy đẹp cứng cáp.Công việc điện rất tốt, có vẻ tốt.
Công cụ thay đổi công cụ cũng hoạt động tốt.
Tôi mua 3 máy từ bạn.Chúng hoạt động tốt, tôi muốn mua thêm thiết bị từ công ty của bạn.
Kiểm tra máy
1. Việc phát hiện độ chính xác của vị trí chuyển động thẳng phải được thực hiện trong điều kiện không tải và phép đo laze sẽ được ưu tiên.
2. Định vị lặp lại phát hiện độ chính xác của chuyển động thẳng, thiết bị được sử dụng để phát hiện giống như được sử dụng để phát hiện độ chính xác của vị trí.
3. Phát hiện độ chính xác trở lại của điểm gốc của chuyển động thẳng.
4. Phát hiện lỗi ngược của chuyển động thẳng được đo nhiều lần (thường là 7 lần) tại ba vị trí gần điểm giữa và cả hai đầu của hành trình, và giá trị trung bình của mỗi vị trí được tính và giá trị lớn nhất của giá trị trung bình thu được là giá trị Lỗi nghịch đảo.






